
Syntheyes Pro(視頻攝像機(jī)跟蹤反求合成軟件)
v2304 免費(fèi)版- 軟件大小:156 MB
- 軟件語(yǔ)言:簡(jiǎn)體中文
- 更新時(shí)間:2024-09-21
- 軟件類(lèi)型:國(guó)外軟件 / 媒體其它
- 運(yùn)行環(huán)境:WinXP, Win7, Win8, Win10, WinAll
- 軟件授權(quán):免費(fèi)軟件
- 官方主頁(yè):https://www.ssontech.com/
- 軟件等級(jí) :
- 介紹說(shuō)明
- 下載地址
- 精品推薦
- 相關(guān)軟件
- 網(wǎng)友評(píng)論
Syntheyes Pro提供視頻攝像機(jī)跟蹤方案設(shè)置功能,可以在軟件上配置平面追蹤方案,可以設(shè)置幾何層次跟蹤,可以設(shè)置變形鏡頭,可以對(duì)相機(jī)校準(zhǔn),方案設(shè)置完畢就可以在軟件上運(yùn)行自動(dòng)跟蹤器,從而求解數(shù)據(jù),為運(yùn)動(dòng)視頻拍攝提供方案優(yōu)化,軟件支持選擇一個(gè)神經(jīng)網(wǎng)絡(luò)來(lái)查找用于自動(dòng)跟蹤的信號(hào),在尋找特定特征類(lèi)型時(shí)就可以啟動(dòng)神經(jīng)網(wǎng)絡(luò),軟件界面提供豐富的配置內(nèi)容,可以設(shè)置相機(jī)變焦鏡頭,可以設(shè)置相機(jī)固定位置,可以設(shè)置三腳架,可以定位場(chǎng)景角落,功能非常多,需要就可以下載使用!
軟件功能
1、圖像預(yù)處理器
預(yù)處理圖像以幫助跟蹤、修復(fù)顏色、糾正鏡頭失真或減少 RAM 消耗。
2、鏡頭校準(zhǔn)
SynthEyes 擁有豐富的工具,可通過(guò)測(cè)試圖案進(jìn)行鏡頭校準(zhǔn)、求解期間計(jì)算失真以及使用校準(zhǔn)數(shù)據(jù)。
3、對(duì)象分離
對(duì)于自動(dòng)跟蹤,請(qǐng)使用粗略的動(dòng)畫(huà)旋轉(zhuǎn)樣條線或綠屏鍵控來(lái)選擇要跟蹤的區(qū)域。
4、追蹤
廣泛的監(jiān)督跟蹤功能集、高性能自動(dòng)跟蹤、3D 平面跟蹤、AprilTags、清理和添加跟蹤器工具...
5、幾何層次跟蹤
非常強(qiáng)大且靈活的工具集,用于 3D 跟蹤移動(dòng)部件的多級(jí)約束層次結(jié)構(gòu)、直接跟蹤提供的網(wǎng)格或使用普通(受監(jiān)督)跟蹤器。
6、解決
強(qiáng)大而靈活的解算器包括約束、路徑鎖定、相機(jī)/相機(jī)立體鎖定、鏡頭畸變、變焦、零權(quán)重跟蹤器、多級(jí)求解階段、光解算器......
7、360°虛擬現(xiàn)實(shí)
SynthEyes 可以處理 360° 球面等距柱狀圖像,以進(jìn)行跟蹤、穩(wěn)定和顯示。
8、視移系統(tǒng)
使用 ViewShift 進(jìn)行復(fù)雜的對(duì)象移除、組合分割鏡頭、生成動(dòng)畫(huà)紋理貼圖等等!
9、穩(wěn)定化
適用于普通鏡頭和 360VR 鏡頭的集成穩(wěn)定功能,包括創(chuàng)建用于導(dǎo)出的“物理”裝備。
10、坐標(biāo)系設(shè)置
這些功能通過(guò)約束、階段、線條以及自動(dòng)或手動(dòng)放置,在 3D 環(huán)境中對(duì)整個(gè)場(chǎng)景進(jìn)行定位、對(duì)齊和調(diào)整大小。
11、集重建
令人驚嘆的紋理提取系統(tǒng)從鏡頭中提取低噪聲紋理。從計(jì)算的 3D 跟蹤器位置創(chuàng)建網(wǎng)格。添加卡片以快速生成幾何圖形。
12、圖形編輯器
檢查跟蹤器或攝像機(jī)位置或速度曲線,或關(guān)鍵幀跟蹤視圖以進(jìn)行覆蓋分析。始終可見(jiàn)的誤差曲線迷你視圖。
軟件特色
1、透視窗口
獨(dú)立于求解的攝像機(jī)來(lái)導(dǎo)航場(chǎng)景,將跟蹤器放置在導(dǎo)入的網(wǎng)格或激光雷達(dá)數(shù)據(jù)上,生成 3D 立體視圖,創(chuàng)建具有抗鋸齒和運(yùn)動(dòng)模糊功能的預(yù)覽影片。
2、圖像輸入/輸出
SynthEyes 可以讀取各種靜態(tài)圖像格式、電影文件,例如 ARRI、BRAW 和 RED。它還可以編寫(xiě)用于預(yù)覽電影的各種圖像和電影格式。
3、網(wǎng)格輸入/輸出
SynthEyes 可以讀取和寫(xiě)入各種網(wǎng)格和頂點(diǎn)緩存格式。
4、腳本編寫(xiě)
通過(guò) Synthia 指導(dǎo)助理,感受打字或口語(yǔ)自然語(yǔ)言控制的新一代強(qiáng)大功能和靈活性。使用 Synthia、Sizzle 或 python 腳本自動(dòng)執(zhí)行頻繁的任務(wù)。
5、工作流程/用戶界面
靈活的用戶界面功能,例如房間、視口布局、自由浮動(dòng)的可配置工具欄、鍵盤(pán)映射、鏡頭預(yù)設(shè)、坐標(biāo)軸方向、版本控制自動(dòng)保存。藝術(shù)家間交流的注釋。
使用方法
1、將Syntheyes Pro直接安裝到電腦,點(diǎn)擊install
2、軟件安裝完畢將補(bǔ)丁復(fù)制到軟件的安裝地址替換
3、打開(kāi)軟件提示語(yǔ)言設(shè)置,直接選擇Chinese

4、支持導(dǎo)出多個(gè)、配置多重導(dǎo)出、出口商產(chǎn)出、文件信息、用戶數(shù)據(jù)文件夾、制作新的語(yǔ)言模板

5、支持立即更新紋理、解決時(shí)重做紋理、添加注釋、脊柱矯正、脊柱解決、編輯場(chǎng)景設(shè)置
6、顯示所有跟蹤器名稱、顯示監(jiān)管名稱、顯示選定名稱、在視口中顯示名稱、使用替代顏色、帶中心點(diǎn)

7、老化時(shí)間:幀數(shù)、強(qiáng)制匹配框架、時(shí)間碼、時(shí)間戳、在相機(jī)視圖中、透視、在預(yù)覽電影中、在保存順序
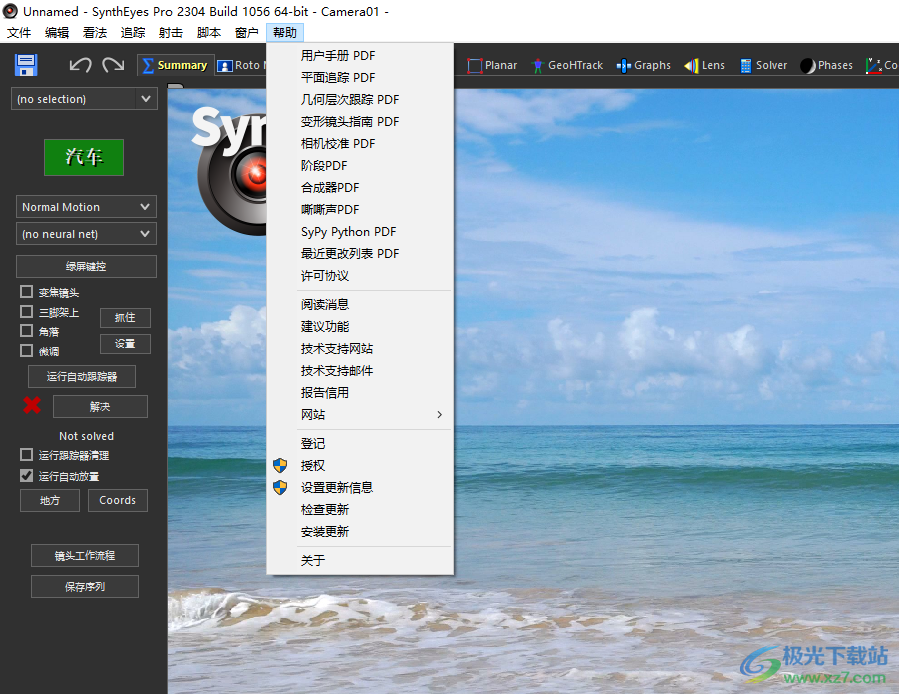
8、支持平面追蹤PDF、幾何層次跟蹤PDF、變形鏡頭指南 PDF、相機(jī)校準(zhǔn)PDF
官方教程
多鏡頭跟蹤
SynthEyes具有強(qiáng)大的功能,可以同時(shí)加載、跟蹤、鏈接多個(gè)鏡頭,并聯(lián)合求解,以找到最佳跟蹤器、相機(jī)和(如果存在)對(duì)象位置。有了這一功能,您可以使用一個(gè)易于跟蹤的“概覽”鏡頭來(lái)確定可跟蹤特征的基本位置,然后以第一個(gè)鏡頭為向?qū)В谝曇蔼M窄、可跟蹤特征較少或其他復(fù)雜情況下跟蹤真實(shí)鏡頭。或者,您可以使用左右相機(jī)鏡頭來(lái)跟蹤3-D功能中的鏡頭。如果您不介意一些大型場(chǎng)景文件,可以將給定集合中的所有快照加載到單個(gè)場(chǎng)景文件中,并將它們一起跟蹤到一組公共點(diǎn),這樣每個(gè)快照都可以共享該集合的相同公共三維幾何體。
注意:雖然立體聲是多鏡頭跟蹤的一種形式,但多鏡頭跟蹤不一定是立體聲的。立體拍攝要求兩只眼睛同步,具有相同的圖像大小、寬高比和長(zhǎng)度(當(dāng)然,必須只有兩只眼睛)。當(dāng)鏡頭是立體的時(shí),可以使用常規(guī)多鏡頭設(shè)置所不具備的特殊附加功能和工具。
在本節(jié)中,我們將演示如何使用一組數(shù)字劇照作為難以追蹤的拍攝路線圖:在這種情況下,三腳架拍攝是不可能進(jìn)行三維恢復(fù)的。這樣的場(chǎng)景需要有監(jiān)督的跟蹤,因?yàn)閯≌盏纳⑴男再|(zhì)。三腳架鏡頭可以自動(dòng)跟蹤,但這沒(méi)有多大意義,因?yàn)槟惚仨氁呀?jīng)執(zhí)行監(jiān)督跟蹤才能匹配劇照,而且在三腳架鏡頭中添加更多跟蹤器也沒(méi)有多大好處。執(zhí)行這個(gè)示例大約需要2個(gè)小時(shí),為了說(shuō)明更復(fù)雜的場(chǎng)景,這個(gè)示例非常復(fù)雜。
從數(shù)字劇照開(kāi)始,這是用數(shù)字靜態(tài)相機(jī)拍攝的9張照片,每張2160乘1440。啟動(dòng)SynthEyes并執(zhí)行文件/添加調(diào)查快照。添加DCP_###.JPG圖像。

為每個(gè)球創(chuàng)建跟蹤器:六個(gè)在桿的頂部,六個(gè)在圓錐體頂部的地面附近。創(chuàng)建每個(gè)跟蹤器,并使用調(diào)查快照工作流在整個(gè)(九幀)快照中跟蹤它。可以使用控制拖動(dòng)使高分辨率靜像上的最終定位更加容易。以一致的順序創(chuàng)建跟蹤器,例如,從左后到左前,然后從右后到右前。完成每條軌跡后,鎖定軌跡
手動(dòng)跟蹤階段將需要不到一個(gè)小時(shí)的時(shí)間。生成的文件可作為multi1.sni使用
使用地面(圓錐體)跟蹤器設(shè)置坐標(biāo)系。將左前跟蹤器設(shè)置為原點(diǎn),將左后跟蹤器設(shè)置為X=0、Y=50、Z=0處的鎖定點(diǎn),將右前跟蹤器設(shè)置為由XY平面跟蹤器
你現(xiàn)在可以解決這個(gè)鏡頭:切換到“解算器”面板并點(diǎn)擊Go!你應(yīng)該為球的位置獲得一個(gè)令人滿意的解決方案,以及一個(gè)相當(dāng)不穩(wěn)定和間隔的相機(jī)路徑,因?yàn)橄鄼C(jī)是從一個(gè)地方走到另一個(gè)地方的。(multi2.sni)
到了第二槍的時(shí)候了。在“快照”菜單上,選擇“添加快照”(或“文件/導(dǎo)入/快照”)。選擇land2dv.avi快照。將“交錯(cuò)”設(shè)置為“否”;這張照片是在漸進(jìn)掃描模式下拍攝的佳能Optura Pi
將相機(jī)視圖全屏顯示,轉(zhuǎn)到跟蹤器面板,并開(kāi)始使用亮點(diǎn)跟蹤器跟蹤此鏡頭中的相同球位置。將“關(guān)鍵點(diǎn)”微調(diào)器設(shè)置為8,因?yàn)樵谂臄z過(guò)程中曝光會(huì)大幅增加。這些球提供了低對(duì)比度,因此一些跟蹤器最容易在跟蹤器面板上的跟蹤器視圖窗口中進(jìn)行控制。右后地平面球被左前地上球擋住,所以你不必追蹤右后球。按照與第一次拍攝相同的順序創(chuàng)建跟蹤器將是最容易的。(multi3.sni)
接下來(lái),在兩組跟蹤器之間創(chuàng)建鏈接,告訴SynthEyes哪些跟蹤器正在跟蹤相同的功能。你將需要最少六(6)個(gè)鏈接之間的鏡頭。
“攝影機(jī)/攝影機(jī)”或“攝影機(jī)/視口匹配”切換到坐標(biāo)系面板和四元視圖。在鏡頭中移動(dòng)足夠遠(yuǎn),使所有跟蹤器都在幀中
若要指定鏈接,請(qǐng)從攝影機(jī)視圖中的AVI中選擇跟蹤器。轉(zhuǎn)到頂部視圖并放大以查找第一個(gè)快照中匹配的三維點(diǎn),然后用ALT鍵單擊它(Mac:命令單擊)。在相機(jī)視圖中選擇下一個(gè)跟蹤器,并在頂部視圖中ALT單擊相應(yīng)的點(diǎn);重復(fù),直到分配完所有。如果一致地創(chuàng)建跟蹤器,則可以按順序?qū)ζ溥M(jìn)行排序。
重要提示:要鏈接跟蹤器,必須打開(kāi)顯示跟蹤器鏈接到的跟蹤器的“坐標(biāo)系”面板(以便您可以看到發(fā)生了什么!)
可以使用三維視圖和攝影機(jī)視圖或兩個(gè)攝影機(jī)視圖執(zhí)行此操作。兩個(gè)相機(jī)視圖的缺點(diǎn)是兩者都鏈接到同一個(gè)時(shí)間條。透視圖提供了一種繞過(guò)這一點(diǎn)的方法。。
相機(jī)/透視圖匹配
可以使用透視視圖和攝影機(jī)視圖同時(shí)顯示兩個(gè)快照。使用“攝影機(jī)和透視”視口布局,或修改“四邊形”布局以將其中一個(gè)視口替換為透視窗口。激活參考快照。在“透視”視圖的右鍵單擊菜單上,選擇“鎖定到當(dāng)前攝影機(jī)”。在右鍵單擊“視圖”菜單中,選擇“在此幀上凍結(jié)”。(您可以使用透視圖中的A、s、d、F、句點(diǎn)或逗號(hào)鍵來(lái)調(diào)整它凍結(jié)在哪個(gè)幀上。)此外,還可以啟用“視圖”菜單上的“僅顯示鎖定的跟蹤器”,以確保只顯示該攝影機(jī)中的跟蹤器,這樣以后就不會(huì)有多個(gè)已解決的跟蹤器堆疊在一起。
使用工具欄按鈕或快照菜單更改用戶界面以激活主快照
按名稱匹配
另一種方法是給每個(gè)跟蹤器一個(gè)有意義的名稱。在這種情況下,單擊“目標(biāo)點(diǎn)”按鈕會(huì)很有幫助:它會(huì)顯示一個(gè)可供選擇的跟蹤器列表。
更微妙的方法是使用匹配的名稱,然后使用“按名稱跟蹤/交叉鏈接”菜單項(xiàng)。具有完全相同的名稱會(huì)使事情變得混亂,因此cross-link命令會(huì)忽略每個(gè)名稱的第一個(gè)字符。然后,您可以將跟蹤器命名為lWindowBL和rWindowBL,并使它們自動(dòng)鏈接。設(shè)置多個(gè)匹配的跟蹤器后,選擇視頻剪輯上的跟蹤器,然后選擇“按名稱交叉鏈接”菜單項(xiàng)。將創(chuàng)建從選定跟蹤器到參考快照上匹配跟蹤器的鏈接。
筆記“按名稱交叉鏈接”不會(huì)鏈接到解算模式設(shè)置為“禁用”的攝影機(jī)/對(duì)象,以便在需要時(shí)控制可能的鏈接目標(biāo)。必須臨時(shí)更改解算模式才能鏈接到禁用的對(duì)象。
關(guān)于鏈接的詳細(xì)信息:具有鏈接的快照應(yīng)該只鏈接到單個(gè)其他快照,而不應(yīng)該鏈接到其他快照。可以將多個(gè)快照鏈接到單個(gè)參照。
準(zhǔn)備解決
完成鏈接后,切換到“解算器”面板。將解算器模式更改為“間接”,因?yàn)榇藬z影機(jī)的解決方案將基于最初從第一個(gè)鏡頭獲得的解決方案。(multi4.sni)請(qǐng)確保此時(shí)“約束”處于禁用狀態(tài)。
點(diǎn)擊Go!SynthEyes將聯(lián)合求解兩個(gè)鏡頭,即找到與兩個(gè)鏡頭最匹配的點(diǎn)位置。每個(gè)跟蹤器仍將有自己的位置;連接在一起的跟蹤器將彼此非常接近。
在本例中,您應(yīng)該能夠看到第二個(gè)(三腳架)鏡頭是從第二個(gè)靜止鏡頭的大致位置拍攝的。即使位置相同,相機(jī)之間的差異和被跟蹤的確切特征也會(huì)導(dǎo)致不完美的匹配。然而,對(duì)于效果插入,像素位置將令人滿意地匹配。最終結(jié)果是multi5.sni。
ViewShift
ViewShift是一個(gè)靈活的效果引擎,其中至少包含部分3D重建的鏡頭可以從其他視點(diǎn)重新拍攝。您可以將其用于以下任務(wù):
?從場(chǎng)景中移除對(duì)象?組合分割鏡頭
?創(chuàng)建較小的對(duì)象放置更改
?選擇性時(shí)間偏移(不需要子幀插值)
?動(dòng)畫(huà)UV紋理貼圖提取(即序列)
大多數(shù)時(shí)候,ViewShift不會(huì)為您生成“最終”結(jié)果;您可能會(huì)將其與下游合成應(yīng)用程序一起使用,以結(jié)合各種效果。ViewShift可以為您生成元素,并為它們進(jìn)行快速預(yù)覽。你可能還需要做一些油漆工作。
ViewShift是一個(gè)工具:它執(zhí)行某些算法,你可以根據(jù)情況使用,它不是一個(gè)只做一兩件事而不做其他事情的黑盒。我們確信SynthEyes用戶會(huì)想出一些瘋狂的方法來(lái)使用ViewShift。
雖然高級(jí)用戶可以在其他3D應(yīng)用程序中進(jìn)行ViewShift效果,但ViewShift中的總體功能集,包括照明匹配和多種重新計(jì)時(shí)模式等便利設(shè)施,應(yīng)該可以擴(kuò)展所有級(jí)別的用戶在合理的時(shí)間內(nèi)可以完成的任務(wù)。
ViewShift基礎(chǔ)知識(shí)
ViewShift的基本思想是,你已經(jīng)完成了一個(gè)3D軌跡,在場(chǎng)景中有一些3D網(wǎng)格(稱之為“反射器”),并將(源)鏡頭的圖像投影到它們上;然后,您可以從不同的有利位置從第二臺(tái)(觀看)相機(jī)“重新拍攝”反射器網(wǎng)格。該觀察相機(jī)可能完全在不同的鏡頭中,也可能是同一鏡頭中不同幀上的同一源相機(jī)。這是一個(gè)組合相機(jī)映射投影和渲染。然后可以將ViewShifted渲染合成到查看攝影機(jī)的快照中。
提示:當(dāng)源鏡頭和查看鏡頭不同時(shí),它們應(yīng)該共享一個(gè)坐標(biāo)系,可以在每個(gè)鏡頭中使用相同的設(shè)置,也可以使用鏈接跟蹤器和間接求解模式。
提示:ViewShift會(huì)注意“背面”和“反轉(zhuǎn)法線”設(shè)置。背面是不可見(jiàn)的,除非網(wǎng)格的“背面”復(fù)選框(位于“三維”面板上)處于啟用狀態(tài),從而使正面和背面都可見(jiàn)。
注意:ViewShift只能與攝影機(jī)軌跡和使用的網(wǎng)格一樣好。
下面是一個(gè)簡(jiǎn)單的物體移除示例,我們希望從鏡頭中移除其中一輛汽車(chē):
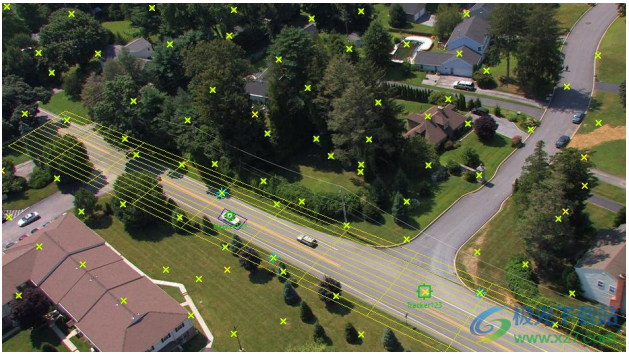
有一個(gè)大平面,這就是這個(gè)例子的反射器。這里它只是一個(gè)平面,但反射器可以是任何3D網(wǎng)格,例如重建的地形模型。
提示:ViewShift不需要反射器網(wǎng)格的UV紋理貼圖——因?yàn)樗羌傻模运仍?D包中嘗試將等效網(wǎng)格拼接在一起更直接。
在任何ViewShift中,都有幾個(gè)大問(wèn)題:
?哪些像素來(lái)自源鏡頭?
?查看快照中將使用哪些像素?
?源鏡頭的哪一幀將用于為任何給定的觀看相機(jī)幀提供像素?
然后還有其他問(wèn)題需要考慮。因此,如果打開(kāi)ViewShift控制面板(“快照”菜單上的ViewShift),它看起來(lái)如下所示:
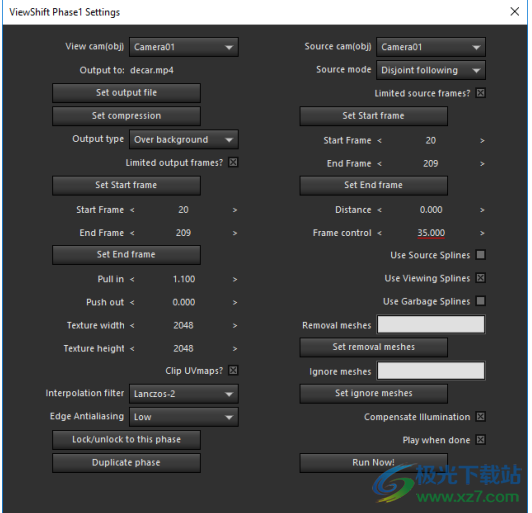
盡管有很多控件,但基本原理應(yīng)該非常清楚,比如頂部的查看相機(jī)和源相機(jī),以及輸出文件和壓縮
我們將在以下部分中處理更復(fù)雜的問(wèn)題和控制
輸出模式輸出模式選擇器有四個(gè)選項(xiàng):
?使用alpha
?背景之上(如上所示)
?UVMap失真圖[不在SynthEyes簡(jiǎn)介中]
?紋理圖[不在SynthEyes簡(jiǎn)介中]
使用alpha。在這種模式下,只有實(shí)際渲染的像素(待討論)出現(xiàn)在輸出圖像中,并具有適當(dāng)?shù)腶lpha通道。這是饋送下游合成應(yīng)用程序的典型模式
背景之上。在這里,渲染的像素實(shí)際上是在原始查看快照上合成的。如果情況允許,可以將其用于預(yù)覽和期末考試。
紋理貼圖。[不在SynthEyes簡(jiǎn)介中]使用此模式生成動(dòng)畫(huà)紋理貼圖,而不是進(jìn)行正常的ViewShift處理。對(duì)于該模式,應(yīng)該只有一個(gè)反射鏡網(wǎng)格,并且必須具有UV貼圖。使用紋理寬度和高度控件設(shè)置紋理大小
源幀定時(shí)模式
ViewShift需要回答以下問(wèn)題:我們應(yīng)該為哪些幀生成結(jié)果,以及源快照中的哪個(gè)幀應(yīng)該用于輸出快照的每個(gè)幀(如Viewing Camera中所示)。為了能夠處理各種場(chǎng)景,根據(jù)源模式選擇器的控制,有許多可能的答案具有一定的復(fù)雜性。
注意:ViewShift將像素從單個(gè)源幀移到目標(biāo)幀:它不會(huì)混合不同幀的像素,這可能會(huì)導(dǎo)致條紋(有時(shí)在靜態(tài)紋理提取中會(huì)出現(xiàn)這種情況)。
與所有模式一樣,有兩個(gè)“開(kāi)始幀”和“結(jié)束幀”字段,一個(gè)用于“查看”快照,另一個(gè)用于源。每個(gè)都有一個(gè)用于限制輸出(源)幀的復(fù)選框,以及兩個(gè)用于設(shè)置“開(kāi)始”和“結(jié)束”幀的按鈕
如果“限制輸出幀”復(fù)選框處于禁用狀態(tài),則將為輸出快照的整個(gè)長(zhǎng)度生成輸出。如果復(fù)選框處于啟用狀態(tài),則將僅從“開(kāi)始幀”到“結(jié)束幀”(包括“開(kāi)始幀和結(jié)束幀”)生成輸出。單擊“設(shè)置開(kāi)始幀”或“設(shè)置結(jié)束幀”按鈕將從快照的當(dāng)前幀設(shè)置該值,并啟用“限制輸出幀”復(fù)選框。
“受限源幀”復(fù)選框和控件的工作原理類(lèi)似,只是這些值只是由源模式確定的可能使用的幀的范圍,而不是使用它們的絕對(duì)聲明或要求
以下是所有源模式:
?相同
?1:1
?縮放
?絕對(duì)
?相對(duì)
?距離
?方向相同
?錯(cuò)位引導(dǎo)
?以下不接合
我們將在下面的小節(jié)中討論大多數(shù)模式,但在介紹了有關(guān)如何控制ViewShift的更多預(yù)備知識(shí)后,我們將把Disjoint模式留到后面的小節(jié)
基本計(jì)時(shí)模式
前六種模式是確定性的,僅基于為源和查看快照指定的幀范圍。我們將在這里討論這些。
相同的源和目標(biāo)使用相同的幀。
1:1。在整個(gè)拍攝過(guò)程中,源的開(kāi)始幀用于輸出的開(kāi)始幀,源開(kāi)始幀之后的幀用于輸出開(kāi)始幀之后,等等。任何幀都不會(huì)超過(guò)源的“結(jié)束幀”。
按比例縮放。從源快照按比例繪制幀:對(duì)于進(jìn)入輸出幀范圍25%的幀,則會(huì)將幀繪制到源幀范圍的25%。
完全的已設(shè)置動(dòng)畫(huà)的“幀”控制微調(diào)器直接控制每個(gè)輸出幀使用哪個(gè)源幀。最初可以手動(dòng)設(shè)置動(dòng)畫(huà),但相似和不相交的重疊模式也可以將其結(jié)果寫(xiě)入該軌跡,這樣您就可以切換到絕對(duì)模式,并在需要時(shí)調(diào)整或擴(kuò)展這些結(jié)果
注意:“幀控制”值始終為零,即0表示拍攝序列或電影的第一幀,而不考慮“從1開(kāi)始”或“匹配幀數(shù)”處理。這是因?yàn)樵谙乱粋€(gè)模式中,它也被用作相對(duì)幀數(shù)。。。
相對(duì)的源幀是輸出幀偏移“幀”控制微調(diào)器的值(恒定或已設(shè)置動(dòng)畫(huà)、正或負(fù))。通常用于創(chuàng)建簡(jiǎn)單的時(shí)移效果
重要的是要注意,只有“相同”或“1:1”模式才能保持原始拍攝時(shí)間,并且應(yīng)盡可能用于插入(分割拍攝)。其他模式適用于刪除,而不是插入太多,因?yàn)樗鼈兛梢愿淖冊(cè)纯煺盏臅r(shí)間,使其加速或減慢。更重要的是,抖動(dòng)效應(yīng)可能會(huì)出現(xiàn),尤其是當(dāng)源和輸出時(shí)序僅略有不同,并且時(shí)序要求重復(fù)或丟棄幀時(shí)
距離模式
距離模式適用于具有相當(dāng)穩(wěn)定的攝影機(jī)平移的鏡頭,無(wú)論是單鏡頭還是組合分割鏡頭。它查看源攝影機(jī)和查看攝影機(jī)的路徑,并選擇與“距離”微調(diào)器匹配的源幀(可以根據(jù)查看幀設(shè)置動(dòng)畫(huà))。
結(jié)合分割拍攝,距離模式允許您使用類(lèi)似于查看視角的源視角,以最大限度地減少視角差異
重要提示:在源攝影機(jī)和查看攝影機(jī)不同的情況下,拆分拍攝都應(yīng)該使用一個(gè)共同的坐標(biāo)系,以便攝影機(jī)路徑相似。否則,這種模式就沒(méi)有意義了。排列它們可以通過(guò)在兩個(gè)鏡頭中以相同的方式設(shè)置坐標(biāo)系來(lái)完成,使用兩者中都存在的跟蹤器;或者通過(guò)使用鏈接和自動(dòng)/間接求解模式(或者可能從種子點(diǎn)/間接)
使用單次拍攝時(shí),“距離”模式是一種簡(jiǎn)單的方法,可以確保移除的源像素不包含要移除的對(duì)象。(然而,該要求可通過(guò)Disjoint模式直接解決。)
如果距離為零,則此模式會(huì)選擇源幀,在該源幀中,源攝影機(jī)在三維坐標(biāo)中“物理上”最接近查看攝影機(jī)。只有當(dāng)源相機(jī)和查看相機(jī)不同時(shí),才使用零距離,否則您還可以使用同幀模式!
如果距離為正,則會(huì)選擇一個(gè)源幀,其中源攝影機(jī)至少在查看攝影機(jī)前面那么遠(yuǎn)。這里,“在前面”意味著源幀在拍攝中比兩者最接近的幀晚。當(dāng)源攝像機(jī)和查看攝像機(jī)相同或不同時(shí),可以使用此模式。
如果距離為負(fù),則會(huì)選擇源攝影機(jī)至少在查看攝影機(jī)后面那么遠(yuǎn)的源幀。這里,“落后”意味著源幀在快照中比兩者最接近的幀更早。
距離模式最初會(huì)查找距離第一個(gè)觀察幀最近的源幀。隨后,它在前一個(gè)源幀周?chē)?0幀窗口中查找與每個(gè)后續(xù)觀看幀最近的源幀。然后,它在較早或較晚的距離處查找?guī)_@種策略可以防止它在鏡頭內(nèi)瘋狂跳躍,盡管在某些情況下可能會(huì)出現(xiàn)問(wèn)題。
使用“距離”模式運(yùn)行快照后,所使用的幀編號(hào)將寫(xiě)入“幀”控制軌跡。您可以檢查這些值以檢查操作,如有必要,可以編輯它們,然后切換到絕對(duì)模式。
提醒:如果使用“距離”模式進(jìn)行分割拍攝,則源拍攝的時(shí)間將不是恒定的,并且可能包含加速、減速、跳躍或下降,具體取決于相機(jī)的運(yùn)動(dòng)
三腳架鏡頭的相同方向
雖然“距離”模式可以處理正常的平移鏡頭,但對(duì)于攝影機(jī)不移動(dòng)的三腳架(節(jié)點(diǎn))鏡頭來(lái)說(shuō),它顯然是無(wú)用的。“同一方向”模式對(duì)三腳架拍攝執(zhí)行類(lèi)似的功能,試圖找到源攝影機(jī)與查看攝影機(jī)在同一方向上觀看的幀。此模式主要用于必須匹配才能插入或刪除對(duì)象的分割拍攝。(對(duì)于相同的源和查看快照,相當(dāng)于“同幀”模式。)
重要提示:您應(yīng)該將兩個(gè)三腳架鏡頭對(duì)準(zhǔn)同一個(gè)公共坐標(biāo)系。這可以通過(guò)在兩個(gè)鏡頭中以相同的方式設(shè)置坐標(biāo)系來(lái)實(shí)現(xiàn),使用兩個(gè)跟蹤器;通過(guò)使用鏈接和三腳架/間接求解模式;或者通過(guò)使用3D面板的“整體”模式進(jìn)行一些手動(dòng)調(diào)整來(lái)暫時(shí)調(diào)整
同向模式最初找到與第一個(gè)觀看幀匹配的最佳源幀。隨后,它在?前一個(gè)源幀周?chē)?0幀窗口。這種策略可以防止它在鏡頭內(nèi)瘋狂跳躍
“同一方向”考慮實(shí)際重疊量,而不僅僅是同一方向:通過(guò)考慮重疊,還考慮了相對(duì)滾動(dòng)。請(qǐng)注意,沒(méi)有什么可以與“距離”模式在“同一方向”上的距離相媲美。
在使用“相同方向”模式運(yùn)行快照后,使用的幀號(hào)將寫(xiě)入幀控制軌跡。您可以檢查這些值以檢查操作,如有必要,可以編輯它們,然后切換到絕對(duì)模式。
提醒:如果您使用“距離”模式進(jìn)行分割拍攝,則源拍攝的時(shí)間將不是恒定的,并且可能包含加速、減速、跳躍或下降,具體取決于相機(jī)的運(yùn)動(dòng)。
使用樣條線控制ViewShift可以使用SynthEye的動(dòng)畫(huà)樣條線(在“旋轉(zhuǎn)”面板上)作為控制ViewShift的一種方法
?查看樣條線限制像素僅移動(dòng)到查看圖像的包含區(qū)域內(nèi),通常用于刪除;
?源樣條線限制像素只能來(lái)自源鏡頭的包含區(qū)域,通常用于提取像素進(jìn)行分割拍攝;
?垃圾樣條線防止像素在源或視圖快照的區(qū)域內(nèi)傳輸,用于網(wǎng)格或其他樣條線的小修復(fù)。
例如,當(dāng)從示例拍攝中移除汽車(chē)時(shí),我們使用隨汽車(chē)移動(dòng)的觀察樣條線——像素僅在該樣條線內(nèi)從源(之前或之后的幾幀)傳輸,以擦除汽車(chē)
如果有多個(gè)查看樣條曲線,則如果像素位于任何查看樣條線內(nèi),則像素將被傳輸,類(lèi)似地,如果它們位于任何源樣條線或任何垃圾樣條線中
必須通過(guò)使用源樣條曲線、使用查看樣條曲線和使用垃圾樣條曲線復(fù)選框(默認(rèn)情況下全部禁用)告知ViewShift是否使用每種類(lèi)型的樣條曲線。這些設(shè)置不僅決定了是否檢查樣條曲線,還決定了當(dāng)源和查看攝影機(jī)相同時(shí),樣條曲線是否應(yīng)被解釋為源樣條曲線或查看樣條曲線(下文將詳細(xì)介紹這種情況)
每個(gè)鏡頭都有一個(gè)用于自動(dòng)跟蹤的大型默認(rèn)樣條線(圍繞整個(gè)圖像)。為了防止干擾ViewShift,必須在快照開(kāi)始時(shí)將其刪除或禁用。
創(chuàng)建新樣條線時(shí),請(qǐng)確保將樣條線的對(duì)象選擇器適當(dāng)?shù)卦O(shè)置為攝影機(jī)(Camera01等)或垃圾——默認(rèn)情況下,新的樣條線是垃圾。
提示:如果您可以創(chuàng)建一個(gè)跟蹤感興趣的功能的跟蹤器,例如在汽車(chē)上,請(qǐng)使用“將跟蹤器導(dǎo)入CP”按鈕來(lái)加快創(chuàng)建樣條曲線的速度;然后可以將其導(dǎo)入樣條曲線的中心點(diǎn),以使整個(gè)樣條曲線移動(dòng)。然后根據(jù)需要在鏡頭長(zhǎng)度上調(diào)整角。
如果您有一個(gè)ViewShift,想要同時(shí)使用(不同的)源樣條線和查看樣條線,并且源和查看攝影機(jī)是相同的,下面是要做的…創(chuàng)建一個(gè)虛擬移動(dòng)對(duì)象(禁用其解算模式),將要用作源的樣條線指定給該移動(dòng)對(duì)象,并將源攝影機(jī)(/對(duì)象)設(shè)置為移動(dòng)對(duì)象。(ViewShift將使用移動(dòng)對(duì)象的源攝影機(jī)進(jìn)行其余處理。)
下載地址
- Pc版
Syntheyes Pro(視頻攝像機(jī)跟蹤反求合成軟件) v2304
本類(lèi)排名
本類(lèi)推薦








裝機(jī)必備
換一批






















- 聊天
- qq電腦版
- 微信電腦版
- yy語(yǔ)音
- skype
- 視頻
- 騰訊視頻
- 愛(ài)奇藝
- 優(yōu)酷視頻
- 芒果tv
- 剪輯
- 愛(ài)剪輯
- 剪映
- 會(huì)聲會(huì)影
- adobe premiere
- 音樂(lè)
- qq音樂(lè)
- 網(wǎng)易云音樂(lè)
- 酷狗音樂(lè)
- 酷我音樂(lè)
- 瀏覽器
- 360瀏覽器
- 谷歌瀏覽器
- 火狐瀏覽器
- ie瀏覽器
- 辦公
- 釘釘
- 企業(yè)微信
- wps
- office
- 輸入法
- 搜狗輸入法
- qq輸入法
- 五筆輸入法
- 訊飛輸入法
- 壓縮
- 360壓縮
- winrar
- winzip
- 7z解壓軟件
- 翻譯
- 谷歌翻譯
- 百度翻譯
- 金山翻譯
- 英譯漢軟件
- 殺毒
- 360殺毒
- 360安全衛(wèi)士
- 火絨軟件
- 騰訊電腦管家
- p圖
- 美圖秀秀
- photoshop
- 光影魔術(shù)手
- lightroom
- 編程
- python
- c語(yǔ)言軟件
- java開(kāi)發(fā)工具
- vc6.0
- 網(wǎng)盤(pán)
- 百度網(wǎng)盤(pán)
- 阿里云盤(pán)
- 115網(wǎng)盤(pán)
- 天翼云盤(pán)
- 下載
- 迅雷
- qq旋風(fēng)
- 電驢
- utorrent
- 證券
- 華泰證券
- 廣發(fā)證券
- 方正證券
- 西南證券
- 郵箱
- qq郵箱
- outlook
- 阿里郵箱
- icloud
- 驅(qū)動(dòng)
- 驅(qū)動(dòng)精靈
- 驅(qū)動(dòng)人生
- 網(wǎng)卡驅(qū)動(dòng)
- 打印機(jī)驅(qū)動(dòng)
網(wǎng)友評(píng)論